10. Point Cloud Types
Point Cloud Types
Every single point in a 3D Point Cloud contains certain attributes. While the x, y, and z coordinate information of a given point may be the most obvious attributes, points may also contain special attributes associated with the shape, color, or texture of the objects in the scene, depending on what type of sensor was used to record the data.
Various factors must be taken into consideration before choosing a point type for any given application. These include,
- Goals of your application
- Type of sensor used
- Nature of the objects in your scene
- Perception algorithms being used
In the upcoming lessons, you'll be using the powerful Point Cloud Library (PCL) to manipulate your point clouds, so let's explore some of the more widely used point types in the PCL.
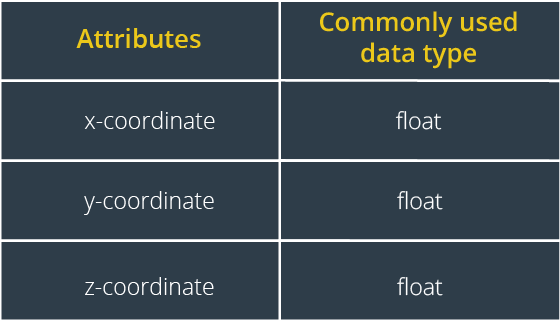
PointXYZ
This is the most commonly used point type. It represents a simple point in 3D space with no additional attributes.
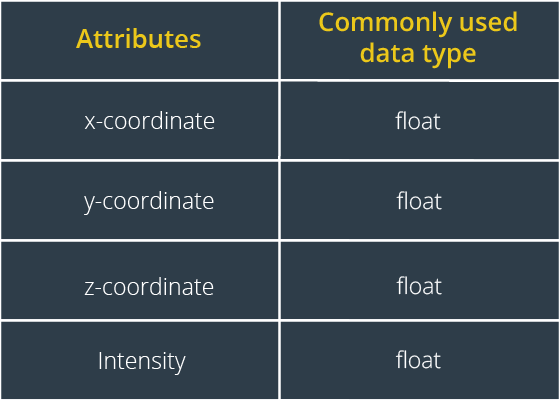
PointXYZI
Deriving from the PointXYZ class, this point type also includes an intensity attribute. Intensity is a measure of the amount of light reflected off from a point on the surface of an object in the scene.
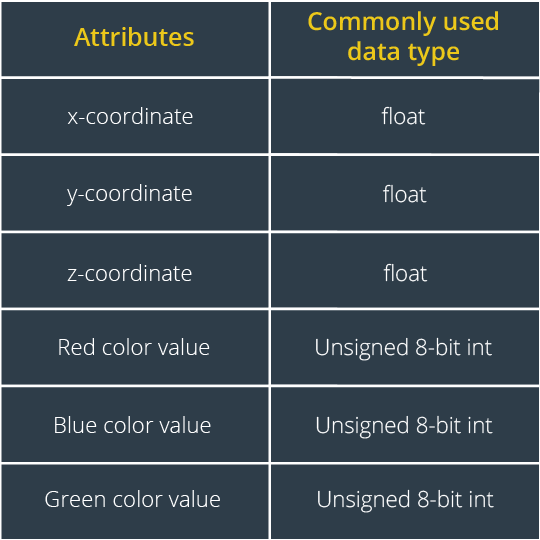
PointXYZRGB
Another derivative of the simple PointXYZ class, which contains information from three color channels.
Normal
One of the other widely used data types, this point type represents the surface normal at a given point, and a measure of curvature. More information about surface normals and curvature can be found here.
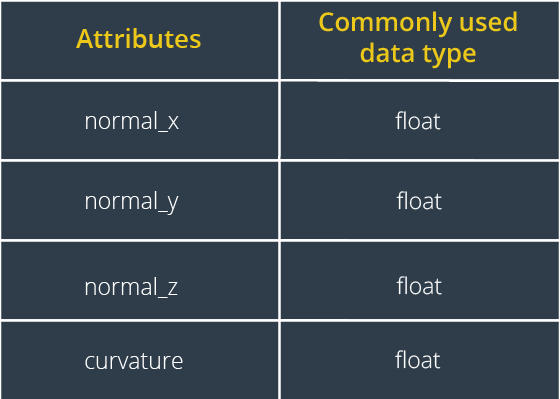
PointNormal
A point structure that holds XYZ data, together with surface normals and curvatures.
